Masters Research (2024 - Current)
深度センサの限界をGPUで突破する。60Hz・低遅延のリアルタイム・ハンドレンダリング技術。
GPUパイプラインを用いたフィルタリングによる
手メッシュ描画の安定化
空中触覚提示における課題である「深度センサのノイズ」と「描画の不安定さ」を解決する手法を開発している。
GPUによる「並列フィルタリング」とCPUによる「軽量な位置推定(3D-PCA)」を連携させることで、
4~6msの高速処理を維持しつつ、激しい動きでも破綻しないロバスト性を実現した。
2025.04 - 2025.10
C#, Unity 6, Shader Lab (Compute Shader)
Intel RealSense SDK
GPU Optimization
技術的アプローチ: Hybrid PipelineGPU Accelerated
GPUとCPUの得意分野を活かした連携処理(ハイブリッド・パイプライン)を実装し、 計算負荷の高いフィルタリング処理をオフロードした。
GPU Pre-processing
局所的直線近傍フィルタリング:
Compute Shaderを用い、前フレームの推定結果を利用したノイズ除去を並列処理で実行。 深度マップ全体に対する走査を高速化した。
CPU Estimation
3D-PCA (主成分分析):
クリーンになった点群データに対し、反復計算を行わない軽量なアルゴリズムで手の位置・姿勢(Orientation)を高精度に推定。
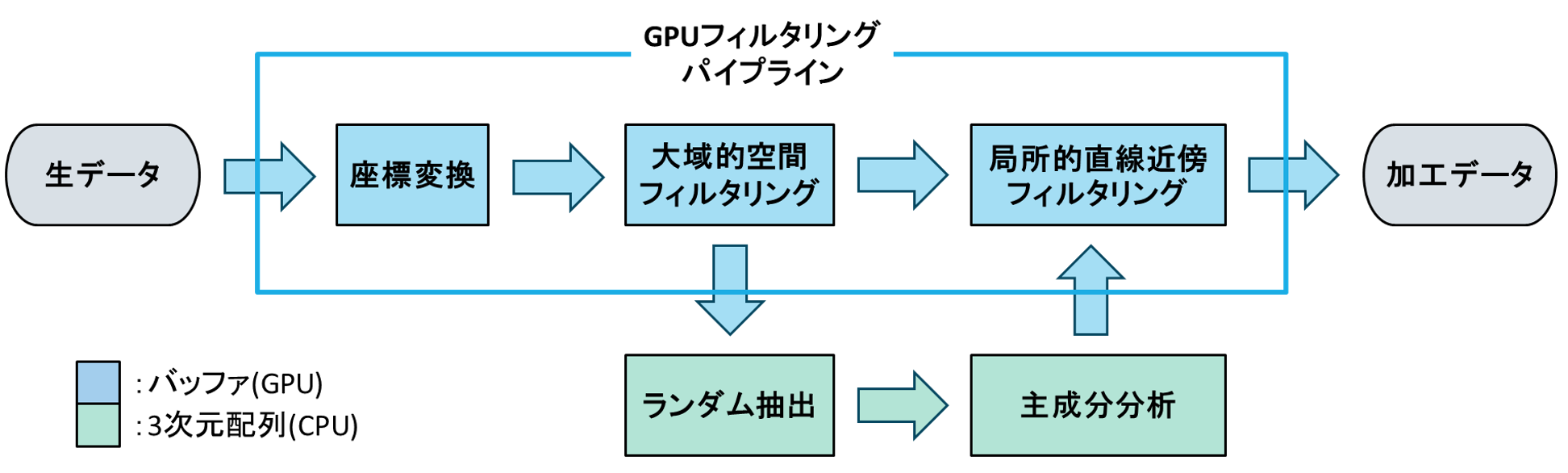
Fig 1. Proposed GPU-CPU Hybrid Architecture
実装結果と成果
Avg Processing Time
4 ~ 6 ms
Target: 16.6ms (60Hz) Cleared
Noise Reduction
26.56 %
Outlier removal rate in dynamic motion
Stability
Jitter / Flicker Free
描画のチラつきを完全に抑制
Research Paper
研究の理論背景、パイプライン詳細、
評価実験結果をまとめた論文PDF。
Research Overview
研究の要点、コアとなるアイデア、
実装の概要を簡潔にまとめた資料PDF。
Source Code
Unityプロジェクト(Compute Shader実装、3D-PCAアルゴリズム)の全ソースコード。